Modeling and Design of a building
akses is a structural analysis and design software developed especially for Indian structural engineers. It is a finite element based analysis software which is developed specifically for design of reinforced concrete buildings. The software is developed by practicing structural engineers with emphasis on traditional Indian practice of site drawings. Once the design is completed, the site drawings are created in .dxf format which can be opened in various CAD softwares such as AutoCAD. In order to minimize data entry time geometric coordinates can be directly imported from the architectural working drawings.
Modeling:
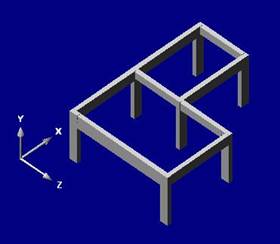
Global Coordinate System
Two reference coordinate systems are used while modeling the building space frames. The global coordinate system is used to define the shape of the building space frame. X�Z plane of the global coordinate system is where the floor plan of the building is drawn. Y axis of the global coordinate system is in the direction of the height of the building. The other view is an isometric view. The local coordinate system is used to define loads and forces of the members. X�axis of the local coordinate passes through the longitudinal axis of that member.



Local Coordinate System
Both the coordinate systems are graphically described here.



The loads can be applied in local or global direction. If you want to apply loads in any other direction, you can resolve them in to a co-ordinate system and apply the resolved loads in that co-ordinate system.
The rotation of a member about its x-axis is defined by angle alpha. Following figure shows a roof truss purlin with alpha. If you create a new vertical member without specifying alpha then its local co-ordinate system will be as shown below.


You can change the orientation of column by changing its alpha. Since the finite element method uses stiffness of members to determine the deflections and forces in the structure it is vary important that you specify correct dimension and orientation of the cross section of members.
As it can be seen from the figures, in normal cases the dead load and live load acting on a beam member would be in the negative Y direction of the local coordinate system. Horizontal loads acting on the whole structure would be in the X or Z direction of the global coordinate system.
In order to generate the geometry of a space frame one has to first define nodes or joints. Nodes / Joints are locations in the global coordinate system and are defined using three coordinates namely x, y and z coordinate of the global coordinate system. Members of the space frame are then defined with reference to these nodes. Nodes / Joints are also used to define supports of the space frame and nodal loads in the global coordinate system.
Degrees of freedom –
All members have 6 degrees of freedom at each end. It means that a member ends can freely displace in 3 direction and can freely rotate about 3 axis. While modeling a space frame all these degrees of freedom must be decided before performing the structural analysis.

12 degrees of freedom
o � origin node, t � terminal node
u � displacement in x direction , v � displacement in y direction, w � displacement in z direction
x � rotation about x axis, y � rotation about y axis, z � rotation about z axis
These degrees of freedom are defined either as restrained [R] or free [F]. If a beam member is simply supported on both ends then its rotational degree of freedom at origin as well as terminal node would be free [F]. When load is applied in Y direction it would rotate about Z axis at the origin node and at the terminal node.

Effect of rotational stiffness of a secondary beam on the main beam.
A simply supported beam �A� with a secondary beam �B� resting on it is shown in Fig-1.4. It can be seen that when the load is applied on the structure, the main beam will deflect and it will twist the secondary beam. If the secondary beam is rigid in tortional stiffness then it will resist the deflection of the main beam and the bending moment and shear force in the main beam will be affected by the tortional stiffness of the secondary beam. In reinforced concrete structures the secondary bean can be designed to have negligible tortional stiffness simply by not providing tortional reinforcement. When the secondary beam is not designed to resist tortional moment, there will be negligible tortional stiffness in the secondary beam and it will not affect the deflected shape of the main beam. While modeling this structure rotational degree of freedom of the secondary beam at the connecting node should be defined as free [F].

Effect of deflection of beam on column
A cantilever beam �A� and a counter balance beam �B� resting on a column �C� is shown in Fig-1.5. When load is applied on beam �A� the deflection of beam �A� will introduce deflection in beam �B� and column �C� as shown in figure with column without hinge. If the column is designed to have negligible bending stiffness then the structure will behave as if there is a hinge in column as shown in Fig-1.5. While modeling this structure, appropriate rotational degree of freedom of the column member at the connecting node should be defined as free [F] so that moment is not introduced in the column. In reinforced concrete structures the connections between members can be easily designed to be rigid or hinged.
Loads –



Loads acting on a building frame
Imposed loads and self weight of the structure act in the direction of gravitational force. As discussed previously, the direction of these loads is in the negative Y axis direction of the global coordinate system.
Figures show loads in negative Y direction of the global coordinate system. Note that for horizontal beams, the direction of load is in negative Y direction of the global as well as local coordinate system. For inclined beams, the direction of loads is in global coordinate system but it is not in the direction of local coordinate system. In the case of loads on inclined beams, the loads should be applied in the global coordinate system and the software resolves these forces in the local coordinate system and then computes the member end forces.
In case of beams supported at both ends, since the direction of Y axis of local as well as global coordinate system is the same, loads should be applied in the local coordinate system so that the software does not have to spend time in resolving the forced in the local coordinate system.
Supports �
It is discussed earlier that each member has 6 degrees of freedom at each node. Similarly a support of the structure has 6 degrees of freedom. It means that a support can displace freely along three axis of the global coordinate system and it can freely rotate about three axis of the global coordinate system. Usually all 6 degrees of freedom of a support is defined as restrained [R]. Some times when hinges are provided at a support then corresponding rotational degree of freedom is defined as free [F].
Since Reinforced concrete design part uses SI Unit system, length should be defined in millimeters and force should be defined in Newton.
Please go through the sample projects and study how the member end restrains are specified in case of cantilever beams and column supporting them. In sample projects you will find cantilever beams, simply supported beams, grid beams and other types of member. You must always pay attention to the torsional degree of freedom of members connected in the same joint. The torsional stiffness of one member can provide moment resistance to other members.
If you want to have the diaphragm effect of slab on the structure you can use dummy beam members in the diagonal direction of the slab with large cross sectional area and rotational degree of freedoms set to unrestrained.
Tutorial –
Study architectural drawing given in DWG format file by the architect.

Decide beam and column locations.
Draw beam and column layout of each floor in the given DWG format file and get it approved from the architect.

Create a new layer named ‘joints0’ in DWG format file.
Set current layer to ‘joints0’.

Scale should be 1 mm = 1 unit.

Set Point Style to ‘X’.

Draw POINT at the intersections of all beams and columns. (Use only one floor plan.)
These POINTS can be imported in to akses as joints.

Save DWG file in DXF format. e.g. Demo3.DXF.
akses – RCBD
Click on akses2016Pro.

akses window will open.

Click on Login.
Following message will be visible.

Click Ok.
Upload DXF

File upload panel becomes visible.

Click on Browse…

Select a DXF format File Name on your computer. It should not have its name same as any existing project.
The DXF file name must be alphanumeric.
Click Upload.
The application will create a new project of uploaded file name. Use Open Project to open the new project.
Open Project

Click on Open Project.
Open Project panel becomes visible.

Select the Project Name.
Click Ok.

Imported Joints will be visible.
Y coordinate of these joints will be zero.
Joints On / Off
![]()
![]()
Click on ‘Joints’ to turn on the joint numbers.

Joint Renumber Y

Click on Joint Renumber Y.
The Application will renumber joint in such a way that lower to higher joint numbers will be along global Y-axis direction.

Copy Entire Floor

Click on Copy Entire Floor.
Copy Floor panel will be visible.

Y is the vertical distance in the global Y-axis direction. Use positive values to copy current floor to upper level.
Click Ok.
The application will create new joints identical to current level at specified distance from the current level.
Click on LEVEL
Floor Level
![]()
![]()
The application writes the current level of the plan view in this field of the Status Bar.
Left click and right click is used to change the level of the plan view.
Use left click to view upper level.

Copy Entire Floor
Click on Copy Entire Floor.
Copy Floor panel will be visible.

Y is the vertical distance in the global Y-axis direction. Use positive values to copy current floor to upper level.
Click Ok.
The application will create new joints identical to current level at specified distance from the current level.
Floor Level
![]()
![]()
Use left click to view upper level.

Zoom All

Click on Zoom All.
The views will be zoomed out so that entire structure is visible.
Newly created joints will be visible.

Floor Level
![]()
![]()
Use right click to view lower level.

Floor Level
![]()
![]()
Use right click to view lower level.
Floor Level
![]()
![]()
Use right click to view lower level.

New Support

Click on New Support.
Click on the Joint you want to define as a support.
New Support panel becomes visible.

‘u’ is the displacement degree of freedom about global X-axis direction.
‘v’ is the displacement degree of freedom about global Y-axis direction.
‘w’ is the displacement degree of freedom about global Z-axis direction.
‘x’ is the rotational degree of freedom about global X-axis direction.
‘y’ is the rotational degree of freedom about global Y-axis direction.
‘z’ is the rotational degree of freedom about global Z-axis direction.
Checked checkbox represents restrain against the degree of freedom.
Normally you keep all the checkboxes checked for a fixed support.
Select support restrains.
Click Ok. The Support Joint is shown in red color.


Delete all joints at 0 level except support joints.
Delete Joint

Click on Delete Joint. The joint connected to a member or support can not be deleted.
Read message in the status bar.
Click on the joint you want to delete.

Click Ok.
Multiple joints can be deleted using select window.
Press left mouse button and drag mouse to select multiple joints.

